Matrix
Before diving into the homogeneous coordinate, it’s important to understand why matrix is preferred in transformation calculation.
Let’s begin the discussion with a simple scenario, If we want to rotate a point p with respect to origin o anti-clock wisely 90°
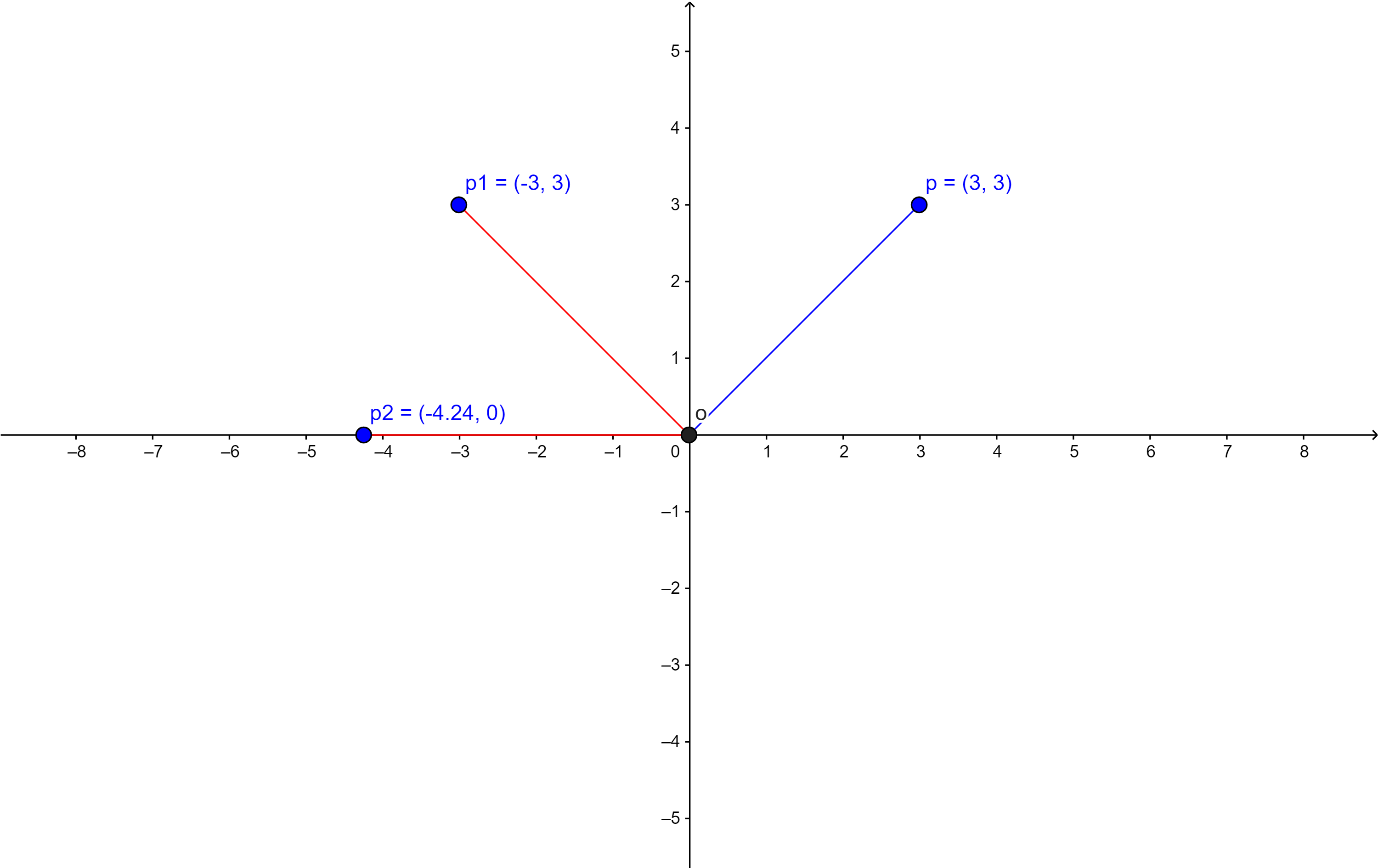
Applying the linear algebra equation Ax=b, it’s easy to write the new position of p1:
\[p_1=R_1 \cdot p= \begin{bmatrix} \cos(90^{\circ})&-\sin(90^{\circ})\\ \sin(90^{\circ})&\cos(90^{\circ})\\ \end{bmatrix}\ \begin{bmatrix} 3\\3\end{bmatrix}=\begin{bmatrix}-3\\3\end{bmatrix}\]If we rotate p1 to p2 by 45 degree, then it can be written as:
\[p_2=R_2 \cdot p_1= \begin{bmatrix} \cos(45^{\circ})&-\sin(45^{\circ})\\ \sin(45^{\circ})&\cos(45^{\circ})\\ \end{bmatrix} \begin{bmatrix} -3\\3\end{bmatrix}=\begin{bmatrix}-4.24\\0.0\end{bmatrix}\]For matrix, the above two steps can be combined into one equation:
\[p=R_2 \cdot R_1 \cdot p_1= \begin{bmatrix} \cos(45^{\circ})&-\sin(45^{\circ})\\ \sin(45^{\circ})&\cos(45^{\circ})\\ \end{bmatrix} \begin{bmatrix} \cos(90^{\circ})&-\sin(90^{\circ})\\ \sin(90^{\circ})&\cos(90^{\circ})\\ \end{bmatrix}\ \begin{bmatrix} 3\\3\end{bmatrix}=\begin{bmatrix}-4.24\\0.0\end{bmatrix}\]Yes, you may observe some pattern from it - rotate this points to any angle and regardless of how many time you rotate it, you will get the correct position from this chain of matrix.
\[p_n=R_n \ldots R_4 \cdot R_3 \cdot R_2 \cdot R_1 \cdot p\]So, the rotation in matrix form is very compact and indeed computational friendly considering the fact that modern PC is very good at matrix computation.
How about translation?
If we wish to translate the point p to a new location p3,
![]()
The position of a point can be changed by adding a vector.
\(p_3=p+\vec{t}=\begin{bmatrix} 3\\3\end {bmatrix}+\begin{bmatrix} -6\\-1\end {bmatrix}=\begin{bmatrix} -3\\2\end {bmatrix}\) It looks ok, because adding up numbers seems easier comparing with matrix multiplication. However, it’s very common that we want to rotate and translate an object. Translation breaks the chain of matrix multiplication as you’ll have to express the relation as: \(B=R \cdot (P+\vec{t}) \quad or \quad B=R \cdot P +\vec{t}\) Either rotation first or translation first will make the form difficult to expand.
Homogeneous coordinate
That’s why homogeneous coordinates is used everywhere in computer graphics. It plays a vital role in solving this problem. What it does is to introduce an addional dimension in the vector. A 2D vector will be expanded to 3D, likewise, a 3D vectoer will bring a 4th component with it.
In a game or a 3D graphical application, a point is normally represented by a 4-component column(row) vector.
\(p=\begin{bmatrix}
a\\b\\c\\1\end
{bmatrix}\)
A vector is obtained by subtraction of two points. It has a zero fourth-component, \(\vec{v}=p_{1}-p_{2}=\begin{bmatrix} a\\b\\c\\1\end {bmatrix}-\begin{bmatrix} d\\e\\f\\1\end {bmatrix}=\begin{bmatrix} a-d\\b-e\\c-f\\0\end {bmatrix}\)
For better illustration, let’s still use the above 2D translation case. The postion of p will be \(\begin{bmatrix}3\\3\\1\end{bmatrix}\).
\[p_3=p+\vec{t}=\begin{bmatrix} 3\\3\\1\end {bmatrix}+\begin{bmatrix} -6\\-1\\0\end {bmatrix}=\begin{bmatrix} -3\\2\\1\end {bmatrix}\]You may wonder what’s the difference by adding one more row of number. It makes no sense as the plus ”+” is still there. Wait a moment, you’ll see the difference.
With the additional row, the vector addition can be written as a multiplication of Matrix and a vector with the help of Identity Matrix:
\[p_3=T \cdot p=\begin{bmatrix} 1&0&-6\\0&1&-1\\0&0&1\end {bmatrix}\begin{bmatrix} 3\\3\\1\end {bmatrix}=\begin{bmatrix} -3\\2\\1\end {bmatrix}\]Previously, the rotation matrix is a 2 by 2 matrix. How will it change to fit in the 3 by 3 case?
Simple!
\[p_2=R_2 \cdot R_1 \cdot p_1= \begin{bmatrix} \cos(45^{\circ})&-\sin(45^{\circ})&0\\ \sin(45^{\circ})&\cos(45^{\circ})&0\\ 0&0&1 \end{bmatrix} \begin{bmatrix} \cos(90^{\circ})&-\sin(90^{\circ})&0\\ \sin(90^{\circ})&\cos(90^{\circ})&0\\ 0&0&1 \end{bmatrix}\ \begin{bmatrix} 3\\3\\1\end{bmatrix}=\begin{bmatrix}-4.24\\0\\1\end{bmatrix}\]The 3 by 3 matrix is written like this because the object rotates along the z-axis.
\[p_3=T \cdot R_2 \cdot R_1 \cdot p_1=\begin{bmatrix} 1&0&-6\\0&1&-1\\0&0&1\end {bmatrix} \begin{bmatrix} \cos(45^{\circ})&-\sin(45^{\circ})&0\\ \sin(45^{\circ})&\cos(45^{\circ})&0\\ 0&0&1 \end{bmatrix} \begin{bmatrix} \cos(90^{\circ})&-\sin(90^{\circ})&0\\ \sin(90^{\circ})&\cos(90^{\circ})&0\\ 0&0&1 \end{bmatrix}\ \begin{bmatrix} 3\\3\\1\end{bmatrix}=\begin{bmatrix}-3\\2\\1\end{bmatrix}\]voilà!! you can chain the rotation and translation operation again.
Moreover, scaling can also be cascaded into the matrix operation. The scale matrix is usually represented as \(S=\begin{bmatrix} s_x&0&0\\0&x_y&0\\0&0&1\end {bmatrix}\).
In conclusion, the transformation matrix has the following general form:
\[p=S \cdot R \cdot T \cdot p_0=\begin{bmatrix} s_x&0&0\\0&x_y&0\\0&0&1\end {bmatrix} \begin{bmatrix} \cos(\theta^{\circ})&-\sin(\theta^{\circ})&0\\ \sin(\theta^{\circ})&\cos(\theta^{\circ})&0\\ 0&0&1 \end{bmatrix}\begin{bmatrix} 1&0&t_x\\0&1&t_y\\0&0&1\end {bmatrix} \begin{bmatrix} x\\y\\1\end{bmatrix}\]